j9九游會官網(wǎng)青年教師團隊在森林場景三維點云理解方面取得進展
近期,j9九游會官網(wǎng)青年教師盧昊團隊在遙感領(lǐng)域TOP刊物《Remote Sensing》(2022年影響因子為5.349)發(fā)表了在利用深度神經(jīng)網(wǎng)絡(luò)實現(xiàn)大規(guī)模森林場景三維點云智能理解方面的進展,北京林業(yè)大學為第一完成單位。
森林場景三維結(jié)構(gòu)對高精度森林資源監(jiān)測、森林生態(tài)系統(tǒng)研究具有重要意義,高分辨率、高精度林區(qū)地形數(shù)據(jù)是森林三維結(jié)構(gòu)推算的關(guān)鍵基礎(chǔ)。近年來,使用無人機(Unmanned Aerial Vehicles, UAV)搭載激光雷達(Light Detection and Ranging, LiDAR)獲取森林3D點云、開展三維結(jié)構(gòu)的研究受到越來越多的關(guān)注。地面點云濾波算法是構(gòu)建森林數(shù)字地面模型的必要技術(shù)過程,傳統(tǒng)的濾波算法要求根據(jù)場景、數(shù)據(jù)和算法的特點選擇合適的參數(shù),性能高度依賴于經(jīng)驗和算法本身的適應性,在地形多變、植被結(jié)構(gòu)復雜的森林場景往往受到制約。
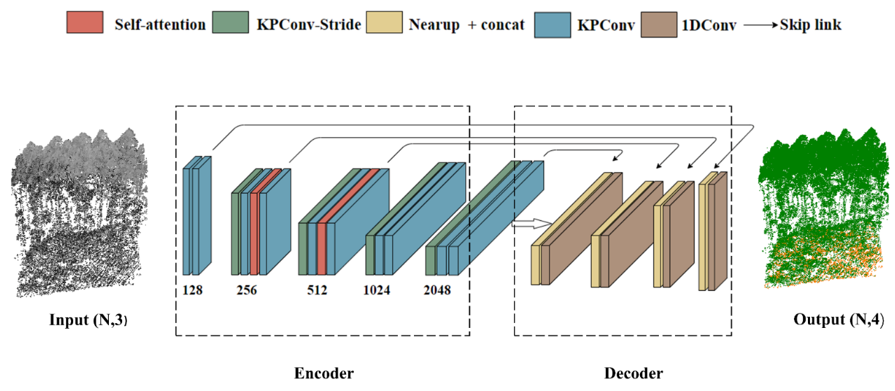
(圖1:新的Terrain-net深度神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu))
針對上述問題,盧昊團隊提出了使用深度神經(jīng)網(wǎng)絡(luò)解決森林點云理解的方法,設(shè)計了一個端到端的的高效網(wǎng)絡(luò)Terrain-net(圖1),其結(jié)合了3D點云卷積和自注意力機制,可以很好地捕獲和融合點云局部和全局特征。網(wǎng)絡(luò)使用覆蓋多種森林環(huán)境的70塊森林樣地超過1500萬個人工標注點進行訓練,并在17塊樣地進行評估。Terrain-net與多種經(jīng)典的濾波算法和深度學習方法進行了比較,實驗結(jié)果(圖2)表明,Terrain-net在多項評價指標上表現(xiàn)最佳。同時,在機載激光雷達(Airborne Laser Scanning, ALS)公共數(shù)據(jù)集OpenGF上進行了網(wǎng)絡(luò)泛化能力測試,結(jié)果表明Terrain-net在直接遷移到其他大規(guī)模場景、其他植被覆蓋環(huán)境和由其他傳感器點云數(shù)據(jù)時依然表現(xiàn)出良好性能。這一新的網(wǎng)絡(luò)將為森林場景點云理解、森林垂直結(jié)構(gòu)觀測等研究提供很好的技術(shù)支撐。
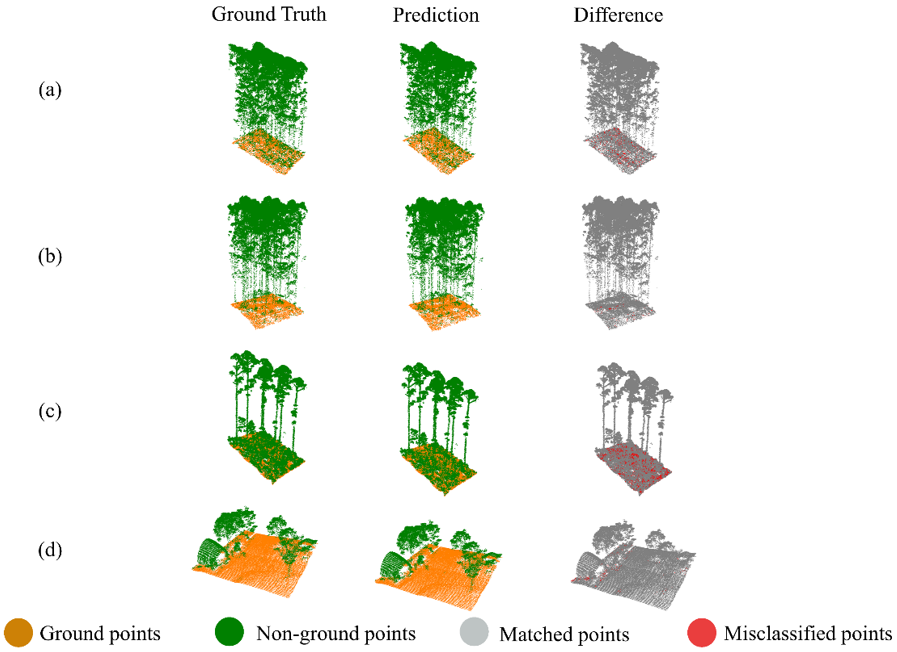
(圖2:Terrain-net地面濾波結(jié)果展示)
該工作以題為“Terrain-Net: A Highly-Efficient, Parameter-Free, and Easy-to-Use Deep Neural Network for Ground Filtering of UAV LiDAR Data in Forested Environments”的論文發(fā)表,j9九游會官網(wǎng)2021級碩士研究生李博文和指導教師盧昊為共同第一作者,盧昊為通訊作者。該研究受到國家重點研發(fā)計劃項目“森林資源激光雷達遙感動態(tài)監(jiān)測與蓄積量估測技術(shù)聯(lián)合研發(fā)” (2020YFE0200800)和國家自然科學基金項目“多源機載LiDAR數(shù)據(jù)融合的落葉松表型分析方法研究”(42001376)的資助,盧昊為北京林業(yè)大學承擔課題/項目的負責人。
論文鏈接:https://www.mdpi.com/2072-4292/14/22/5798,網(wǎng)絡(luò)模型將開源在:https://github.com/bjfu-lidar/terrain-net。
撰稿人:盧昊、徐智穎
審稿人:許福